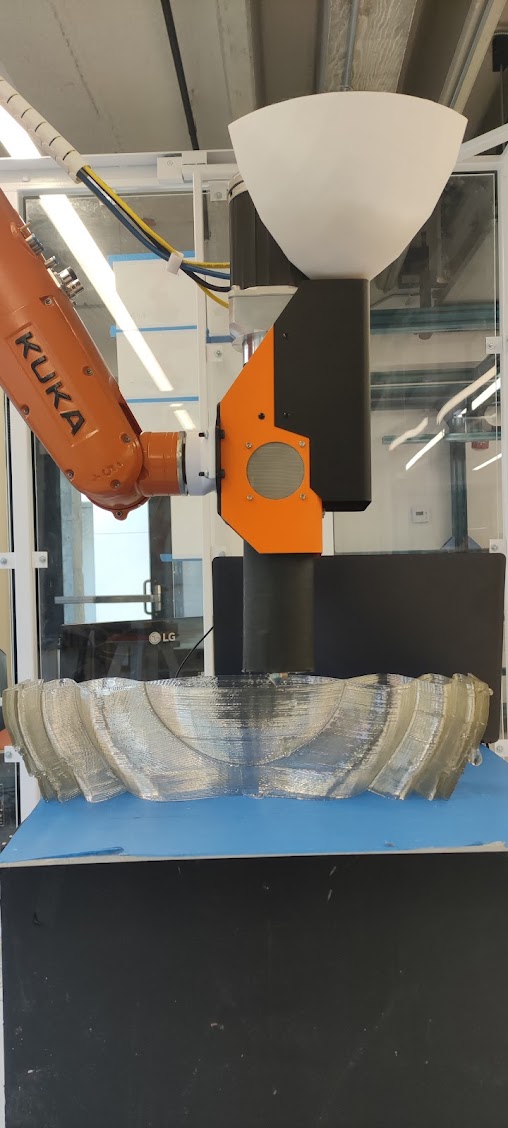
Integrating and testing Massive Dimension’s pellet extruder at our lab, exploring interactive approaches in robotic fabrication. This project focuses on integrating a pellet extruder with a Kuka robot, employing an IoT approach through a UDP connection. This setup allows for seamless integration of the extruder with the robot. I developed a customized OSC interface, ESP32 firmware, and toolpath integration for enhanced robot control, enabling synchronization between the robot and the extruder. This method significantly broadens the scope for experimentation in 3D printing. It allows for creating customized User Interfaces to control and adjust the extruder, and OSC can connect to different programs like Grasshopper, Blender, or TouchOSC, providing many options to interact with the extruder.




This project not only enhances our capabilities in 3D printing but also opens up new avenues in robotic fabrication. Our exploration into the integration of IoT with robotics paves the way for more innovative and efficient manufacturing processes in the future.